
Robotem Rovné – Challenges of autonomously driving 100π meters in a straight line
Each year in May Radioklub Písek is organizing the Robotem Rovnné competition which is taking place in a park near Písek’s center and requires a robot to autonomously traverse a 314,1592 meter long park road (which, coincidentally is 3,141592 meter wide). If the robot can not travel the full distance (because it is driving off the road), the longest distance reached is evaluated. If multiple robots can reach the full distance, the fastest robot to accomplish this feat is earning the trophy. Each robot has up to four trials with the best result being taken into consideration for the final results.

The park road is made of cobblestones which requires some minimal wheel diameter as very small robots (with very small wheels or tracks) experience significant disturbances by the uneven underground.

107-systems did participate with the four-wheel-drive version of the T07 platform which features four brushed DC gear motors controlled by two CyphalRobotController07/CAN Cyphal/CAN enabled motor driver boards. As robot controller an Arduino Portenta X8 based Pika Spark (within the yellow plastic enclosure) is used.

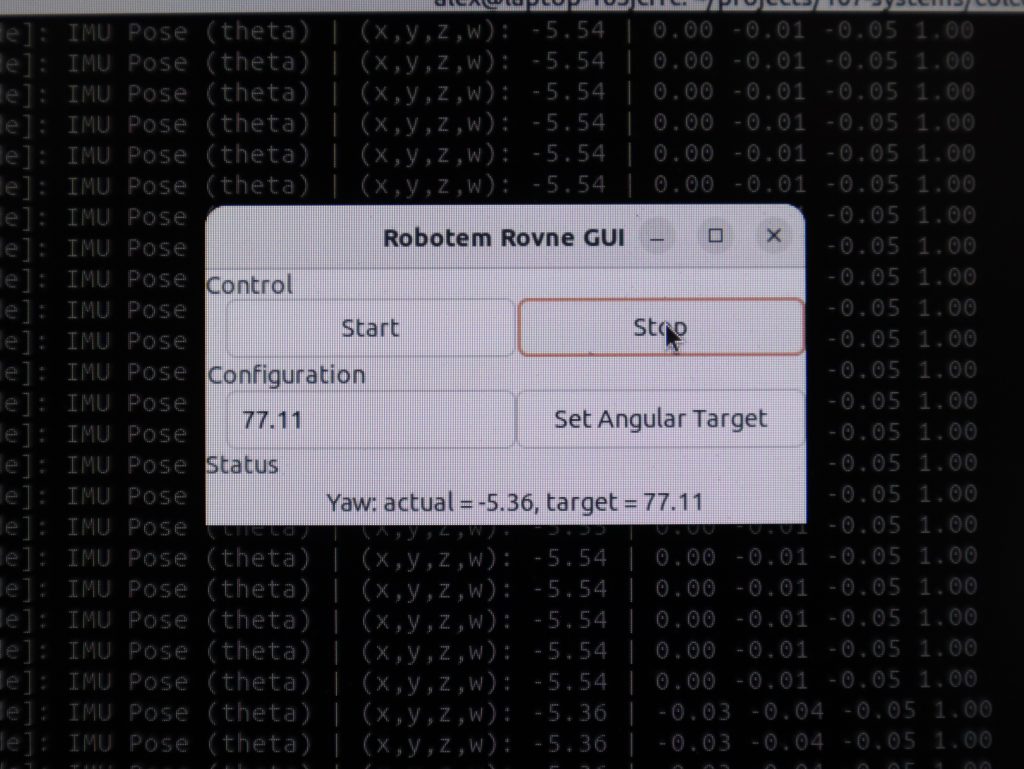
Onboard the Pika Spark a ROS2 application is executed which is guiding the robot along a predefined heading by comparing an externally configured target heading to the actual heading determined by Pika Spark’s onboard 9-DoF IMU. A small GUI tool has been written to enable remote start/stop as well as setting of the desired target heading and displaying the current actual heading.
In addition to the technical requirements of the competition we had to contend with rain. While the T07 platform can deal with a splash of water pouring rain is another matter entirely. In order to deal with the weather conditions temporary measures shielding the electronic from water were taken onsite involving a cardboard box (formerly containing the robot’s batteries) and a good measure of duct tape.

107-systems robot managed to traverse 58 meters running only with an IMU based heading control algorithm. With a maritime flux compass a team from TH Deggendorf managed to travel the full length in one direction. However, longer distances usually require stabilization with additional techniques such as GNSS or even cameras for detecting the curbstones of the road. Finally, here are a couple of images from other contestants:






Resources
| Pika Spark | is an Arduino Portenta X8 based micro robot control system combining an unprecedented amount of computing power and interfaces within an extremely small form factor. |
| T07 | is a 3D printable Cyphal-enabled outdoor mobile robotics platform. |
| robotem-rovne | is a ROS2 application running on the Pika Spark inside a Docker container enabling heading stabilized control of the robot. |
| robotem_rovne_gui | is a ROS2 application running on a Laptop offering a small GTK-based GUI for interacting with the robot. |
| t07_robot | is a ROS2 application running on the Pika Spark working as interface to the Cyphal/CAN controlled motor driver boards. |

Alexander Entinger is a highly experienced embedded engineer with a focus on robotic systems. By providing hard-won expertise designing embedded systems for real-world embedded applications Alexander Entinger is helping companies developing robotic systems or components for robotic systems to achieve their desired business outcomes.